
Map Edit Pro 5.00
Программа MapEDIT PRO предназначена для цифровой фотограмметрии. В дополнение ко всем возможностям базовой программы MapEDIT, содержит блок фотограмметрической обработки аэро и космических снимков. Программа может обрабатывать два типа снимков:
1) Снимки центральной проекции (аэро и космические).
2) Сканерные снимки (космические).
Растровые изображения аэро- и космических фотоснимков подвергаются специальным преобразованиям для устранения геометрических и фотометрических искажений, обусловленных кривизной Земли, неровностями рельефа местности, погрешностями съемочной аппаратуры и др., характерных для снимков, а так же преобразованиям, связанным с переводом в заданную картографическую проекцию.
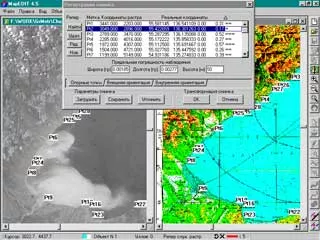
Основой для преобразований является набор опорных точек, задаваемых оператором на снимке, с указанием их точных географических координат.
Особенностью процедуры привязки является режим уточнения параметров внешней и внутренней ориентации снимка, если они заданы частично или с большими погрешностями. Процесс уточнения параметров снимка может выполняться итерационно с сохранением в файле промежуточных результатов вместе с набором опорных точек.
Удобный интерфейс позволяет быстро вводить и редактировать опорные точки, практически не прибегая к вводу цифровых значений координат, а также постоянно контролировать правильность ввода. Возможность отследить опорные точки, для которых расстояние между расчетными координатами и их истинными значениями превышает предельную погрешность наблюдения, позволяет делать вывод о непротиворечивости найденных параметров снимка и об ошибках оператора при задании опорных точек.
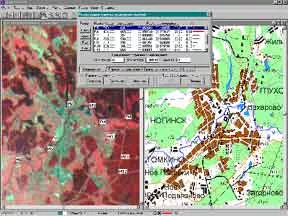
После получения (уточнения) параметров снимка можно выполнять его трансформацию. Снимок автоматически преобразуется в картографическую проекцию, заданную для отображаемой векторной карты. При трансформации учитывается высота рельефа местности в опорных точках. После выполнения преобразований снимка при помощи команды "Добавить снимок в карту" его можно использовать для составления и обновления цифровых карт средствами программы MapEDIT так же, как и обычный растровый слой.
Снимки центральной проекции
Блок обработки снимка центральной проекции включает следующие преобразования:
- Коррекция геометрических искажений, связанных с кривизной поверхности Земли, ориентацией камеры в момент съемки, высоты рельефа местности в опорных точках.
- Привязка снимка к земному эллипсоиду и преобразование в заданную картографическую проекцию.
- Уточнение местоположения и ориентации камеры в момент съемки по опорным точкам.
Исходными данными для обработки снимков центральной проекции являются:
- Параметры фотокамеры и снимка (фокусное расстояние, коэффициент увеличения отпечатка, координаты главной точки снимка и др.).
- Параметры внешней ориентации камеры в момент съемки. Возможен расчет или уточнение ориентации по опорным точкам на снимке.
- Набор опорных точек. Под опорными точками понимаются опознанные на снимке точки местности с известными географическими координатами. MapEDIT позволяет скалывать опорные точки непосредственно с векторной или растровой карты района съемки, не прибегая к вводу цифровых значений координат.
Сканерные снимки
Сканерный снимок отличается от снимка центральной проекции тем, что изображение формируется не мгновенно (практически из одной точки пространства), а в течении некоторого времени, путем поперечного сканирования поверхности Земли специальным сканирующим устройством, находящимся на борту космического аппарата (КА). Обработка сканерных снимков усложняется в связи с тем, что необходимо с высокой точностью учитывать поведение КА на интервале сканирования, который может составлять несколько десятков секунд.
Разработанный блок обработки сканерных космических снимков решает следующие задачи:
- Коррекция геометрических искажений сканерного снимка, связанных с движением КА, кривизной поверхности и вращением Земли, ориентацией и особенностями работы сканирующего устройства.
- Привязка снимка к земному эллипсоиду и преобразование в заданную картографическую проекцию.
- Уточнение ориентации сканирующего устройства на время съемки и начальных условий движения космического аппарата (КА) по опорным точкам.
Исходными данными для обработки сканерных снимков являются:
- Начальные условия движения КА (координаты, скорости, баллистический коэффициент на момент начала сканирования). Координаты и скорости движения космического аппарата могут быть отнесены к системам координат связанным с Землей WGS-84, ПЗ - 90 или к инерциальной системе координат заданной эпохи (например, стандартной эпохи J2000,0). В последнем случае, время, на которое даны начальные условия движения должно быть представлено в шкале UTC. Возможно уточнение начальных условий движения КА по имеющимся на снимке опорным точкам.
- Тип и параметры сканирующего устройства (вид сканирования, скорость сканирования, угловой размер мгновенного поля зрения и др.).
- Ориентация сканирующего устройства на время съемки. Ориентация описывается тремя эйлеровскими углами поворота в системе координат, связанной с КА на момент начала сканирования. Возможен расчет или уточнение ориентации по опорным точкам на снимке.
- Набор опорных точек.
- Необязательные параметры баллистической модели движения, позволяющие более точно рассчитать траекторию КА, включающие:
- поправки к шкале всемирного времени UTC: dUT1, IAT - UTC, угловые координаты истинного полюса вращения Земли. Информация по этим поправкам публикуется Международной службой вращения Земли (IERS);
- в случае использования динамической модели атмосферы необходима информация по Солнечной и геомагнитной активности: коэффициент солнечной активности F10.7 и геомагнитной активности Kp. В Российской Федерации эта информация регулярно публикуется институтом прикладной геофизики имени академика Федорова Е.К.
- При расчете баллистической траектории КА может учитываться:
- нормальный (связанный с Земным эллипсоидом), или возмущенный (учитывающий неравномерность распределения масс внутри Земли) геопотенциал;
- статическая или динамическая (с учетом положения Солнца, солнечной и геомагнитной активности) атмосфера;
- притяжение Солнца и Луны.
Использование точной дифференциальной баллистической модели движения космического аппарата и модели ориентации оптической оси сканирующего устройства, предполагающей ее изменения во времени, позволяет при наличии достаточного числа опорных точек привязать сканерный снимок к земному эллипсоиду с погрешностью, не превышающей двух элементов разрешения снимка, на интервалах сканирования - 15-25 секунд (120-200 км). Так для снимков, полученных со спутника "Ресурс 3", имеющих разрешающую способность на местности 80 метров, ошибка привязки не превышает 100 - 160 м.